Introduction:
After our revival of BlueZ in our previous blog post, the next crucial step is to simplify the understanding of DBUS specification and its usage. DBUS, an inter-process communication (IPC) system, is vital in the Linux ecosystem, enabling seamless communication between applications. However, its complexity often deters developers, especially beginners. In this post, we’ll demystify DBUS by breaking down its components, explaining its architecture, and providing practical examples. You’ll learn how DBUS facilitates communication within the BlueZ stack and other applications, making Bluetooth management smoother. Whether you’re a seasoned developer or a beginner, this guide will equip you with the knowledge to effectively leverage DBUS in your projects.
Understanding DBUS:
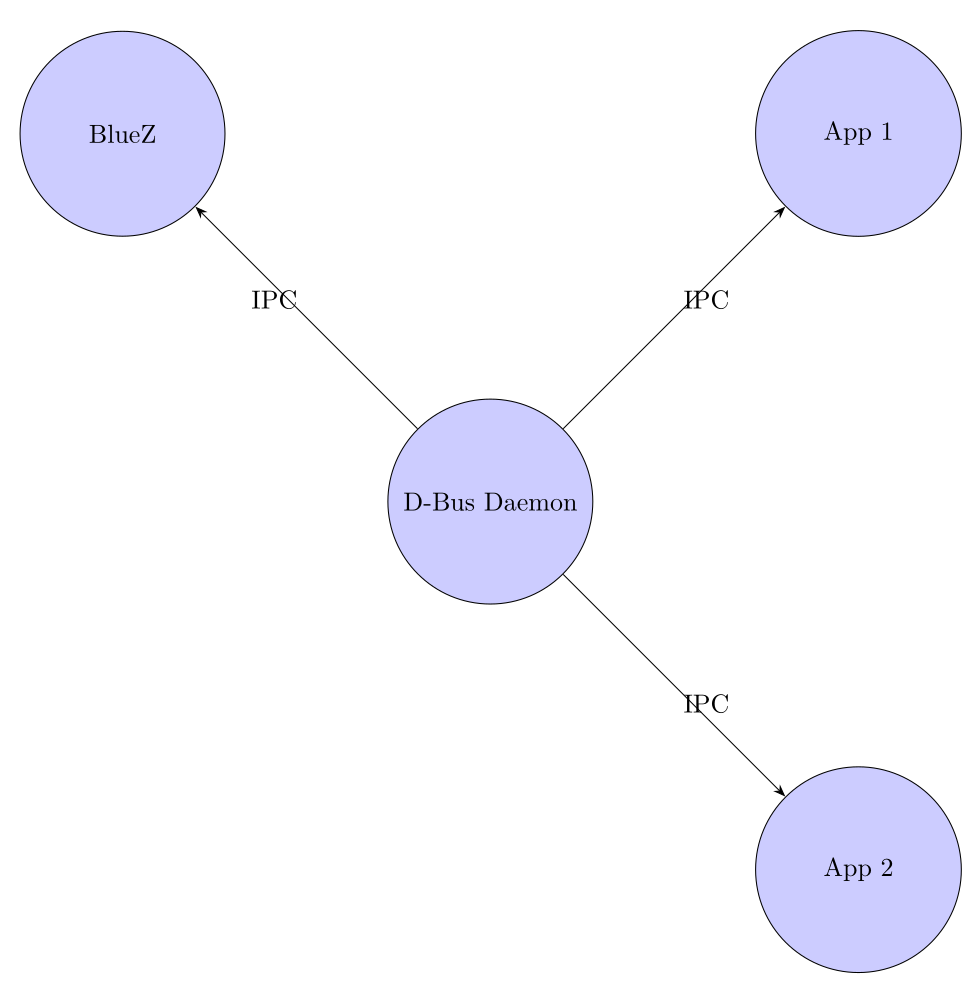
D-Bus, known as Desktop Bus, is a powerful message bus system designed for interprocess communication (IPC) on Unix-like operating systems. It serves as a fundamental component within the BlueZ stack, enabling seamless communication between Bluetooth-enabled applications and system services. D-Bus simplifies the management of Bluetooth functionality by providing a standardized protocol for applications to interact with Bluetooth hardware, manage device discovery, pairing, and data transfer across Bluetooth connections. Within BlueZ, D-Bus acts as a mediator, allowing applications to access Bluetooth functionalities through well-defined interfaces and methods. This architecture enhances the flexibility and modularity of the BlueZ stack, enabling developers to create Bluetooth applications that integrate smoothly with the underlying system and adhere to industry standards.
In practice, D-Bus in BlueZ facilitates various tasks, such as configuring Bluetooth adapters, scanning for nearby devices, establishing connections, and exchanging data securely over Bluetooth. By abstracting the complexities of Bluetooth protocol management into a unified interface accessible via D-Bus, BlueZ ensures compatibility across different hardware platforms and software environments. This approach not only streamlines the development of Bluetooth applications but also improves system stability and performance by leveraging D-Bus’s efficient messaging framework. Overall, D-Bus plays a pivotal role in enhancing the usability and reliability of Bluetooth functionality within Unix-like systems, making it a cornerstone technology in the realm of wireless communication.
DBUS Type system:
The D-Bus type system is integral to how data is structured and communicated within the D-Bus messaging framework. It defines how various types of data are represented, transmitted, and interpreted across applications that communicate via D-Bus. Here are the key aspects of the D-Bus type system:
- Basic Types: D-Bus supports several basic data types similar to those found in programming languages. These include:
- Integer types (integers of different sizes)
- Floating-point types (floats and doubles)
- Boolean (true/false values)
- String (UTF-8 encoded text)
- Byte (an 8-bit unsigned integer)
- Container Types: D-Bus allows complex data structures through container types. These include:
- Arrays: Sequences of elements of the same type.
- Dictionaries: Key-value pairs where keys are strings and values are of a specified type.
- Variants: A special type that can hold any other type of data, allowing flexibility in message content.
- Object Paths: D-Bus uses object paths to uniquely identify objects within its messaging system. Object paths are structured like file system paths (“/org/example/object”).
- Signatures: D-Bus uses type signatures to describe the types of arguments and return values in messages. Signatures are concise representations of data types, allowing applications to interpret and validate the data being sent or received.
- Marshalling: D-Bus handles the marshalling (serialization) and unmarshalling (deserialization) of data between different applications. This ensures that data is transmitted in a format that can be understood by both the sender and the receiver, regardless of programming languages or hardware platforms involved.
- Type Safety: The type system in D-Bus promotes type safety by ensuring that data passed between applications is correctly typed and interpreted, reducing the risk of errors or miscommunication.
Type system: Basic Types:
- Integer Types:
- Symbol:
i(forint32),u(foruint32),x(forint64),t(foruint64). - Description: Integers can be signed (
int32andint64) or unsigned (uint32anduint64), representing different ranges of numerical values.int32(i):#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; gint32 int_value = 42; gint32 parsed_value; variant = g_variant_new_int32(int_value); g_variant_get(variant, "i", &parsed_value); g_print("Parsed int32 value: %d\n", parsed_value); g_variant_unref(variant); return 0; }uint32(u):#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; guint32 uint_value = 123; guint32 parsed_value; variant = g_variant_new_uint32(uint_value); g_variant_get(variant, "u", &parsed_value); g_print("Parsed uint32 value: %u\n", parsed_value); g_variant_unref(variant); return 0; }int64(x):#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; gint64 int64_value = 9876543210; gint64 parsed_value; variant = g_variant_new_int64(int64_value); g_variant_get(variant, "x", &parsed_value); g_print("Parsed int64 value: %ld\n", parsed_value); g_variant_unref(variant); return 0; }uint64(t):#include <glib.h> #include <gio/gio.h> int main(void { GVariant *variant; guint64 uint64_value = 1234567890; guint64 parsed_value; variant = g_variant_new_uint64(uint64_value); g_variant_get(variant, "t", &parsed_value); g_print("Parsed uint64 value: %lu\n", parsed_value); g_variant_unref(variant); return 0; }
- Symbol:
- Floating-point Types:
- Symbol:
d(fordouble),f(forfloat). - Description: Floating-point types represent decimal numbers with varying precision.
double(d):#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; gdouble double_value = 3.14159; gdouble parsed_value; variant = g_variant_new_double(double_value); g_variant_get(variant, "d", &parsed_value); g_print("Parsed double value: %lf\n", parsed_value); g_variant_unref(variant); return 0; }float(f):#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; gfloat float_value = 1.2345; gfloat parsed_value; variant = g_variant_new_float(float_value); g_variant_get(variant, "f", &parsed_value); g_print("Parsed float value: %f\n", parsed_value); g_variant_unref(variant); return 0; }
- Symbol:
- Boolean Type:
- Symbol:
b. - Description: Booleans represent true or false values.
#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; gboolean bool_value = TRUE; gboolean parsed_value; variant = g_variant_new_boolean(bool_value); g_variant_get(variant, "b", &parsed_value); g_print("Parsed boolean value: %s\n", parsed_value ? "TRUE" : "FALSE"); g_variant_unref(variant); return 0; }
- Symbol:
- String Type:
- Symbol:
s. - Description: Strings represent UTF-8 encoded text.
#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; const gchar *string_value = "Linumiz"; gchar *parsed_value; variant = g_variant_new_string(string_value); g_variant_get(variant, "s", &parsed_value); g_print("Parsed string value: %s\n", parsed_value); g_variant_unref(variant); g_free(parsed_value); return 0; }
- Symbol:
- Byte Type:
- Symbol:
y. - Description: Bytes represent an 8-bit unsigned integer.
#include <glib.h> #include <gio/gio.h> int main(void) { GVariant *variant; guchar byte_value = 0x7F; guchar parsed_value; variant = g_variant_new_byte(byte_value); g_variant_get(variant, "y", &parsed_value); g_print("Parsed byte value: %hhu\n", parsed_value); g_variant_unref(variant); return 0; }
- Symbol:
Conclusion:
In this blog post, we’ve explored the fundamental data types supported by D-Bus using GVariant in C. From boolean and string to byte and floating-point types, we’ve demonstrated how to create and parse these values, highlighting their respective type signatures (b, s, y, etc.). Understanding these basic types lays a solid foundation for leveraging D-Bus in inter-process communication scenarios, ensuring efficient data exchange between applications.
In the next part of this series, we will delve into more complex data types such as arrays, structures, dictionaries, and variants. These advanced types enhance the flexibility and power of D-Bus, enabling developers to build more sophisticated and interoperable software solutions. Stay tuned as we continue our journey into mastering D-Bus for robust and scalable application development.
3 Comments
Hi sir,
Can you explain why we are using dbus rather than other IPC mechanisms like sockets?
Technically DBUS uses UNIX domain socket underneath. DBUS implements it’s own serialization, marshaling and so on top of socket to make it consumer agnostics. Technically DBUS specification doesn’t restrict any specific IPC to use with, in Linux DBUS is implemented using socket.
[…] our previous post, we explored the basic types in D-Bus, laying a strong foundation for understanding how D-Bus […]